本位旨在建立对ROS工作空间目录体系的认知以提升在操作其他项目的便捷性
Getting started
step1.打开你的终端
当然你也可以通过组合键“Ctrl+Alt+T”唤起比系统自带终端更好用的“终端终结者”应用来代替终端
同时在开始前我建议先给你的虚拟机拍摄一个有效快照(以备不时之需)
在终端用户主目录路径(~)下输入以下命令,创建一个工作空间目录“ros_workspace_test”和其下子目录“src”
(其最终成果如下图所示):
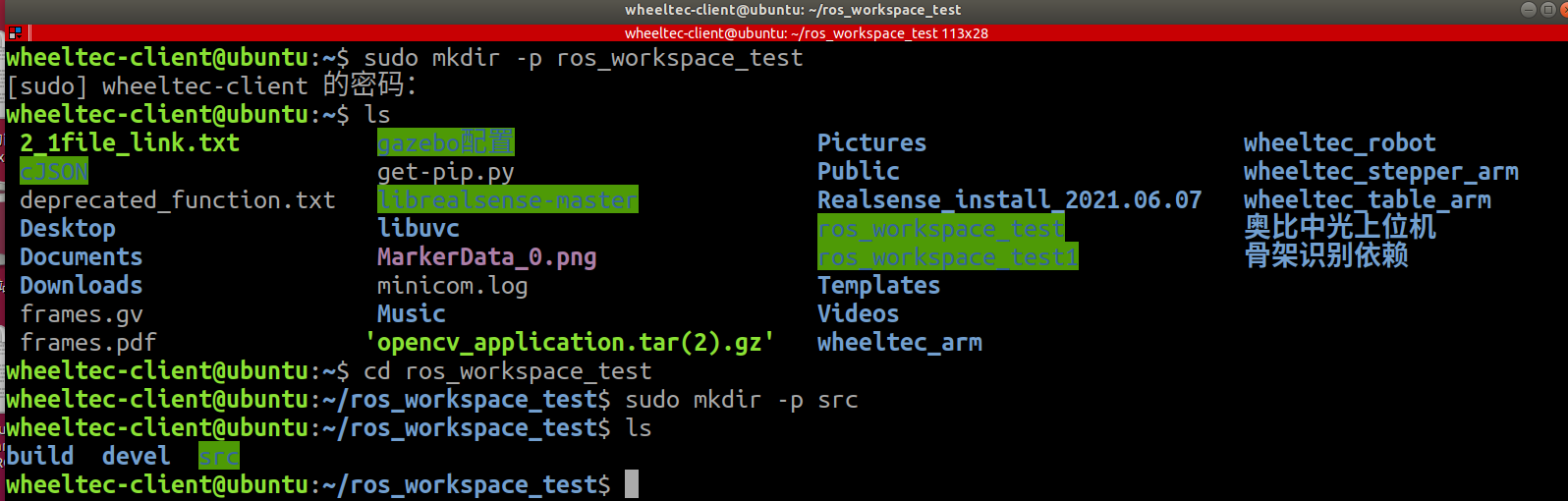
温馨提示:善用自动补全(热键为TAB) 创建目录的标准示例如下所示:
sudo mkdir <file name> 若你想在创建父目录的同时再创建一个子目录,那么你要在mkdir命令的后面加上“-p”参数,如下所示
sudo mkdir -p <file name>/<file name>由于你在键入创建目录命令前使用了“sudo”,系统会要求你提供当前所登录用户的密码,在本次所使用的ROS镜像中密码统一如下:
dongguan
注意:在linux终端中输入密码将不会显示 !
“-p”参数用于按需创建中间目录。在本文中用于同时创建”ros_workspace_test”目录和”src”子目录。
step2
将工作空间加权
执行
sudo chmod -R 777 ros_workspace_test/
执行该命令后,ros_workspace_test目录以及其所有子目录和文件就被当前用户赋予了完全的读、写和执行权限(rwxrwxrwx)。
在linux系统中,权限由九个字符分三足表示。“r”代表文件所有者,所属组或其他用户的文件,“w”代表读取和写入,“x”代表执行,“-”代表无权限。完全读写权限(rwxrwxrwx/777)的计算方式如下所示:
分割你的权限表达方式:rwx|rwx|rwx
r=4 w=2 x=1
第一组:rwx=4+2+1=7
第二组:rwx=4+2+1=7
第三组:rwx=4+2+1=7
在命令中使用数字表达为“777”注意:为任何文件/目录赋予权限可以让任何用户都能对该目录及其内容进行修改,这可能会导致安全问题。因此在实际使用中,请谨慎考虑是否需要赋予如此广泛的权限
step 3
编译工作空间
跳转到已创建好的工作空间中
cd ros_workspace_test在工作空间目录下输入编译命令,编译将在工作空间创建build与devel子目录
catkin_make编译完成后如下图所示
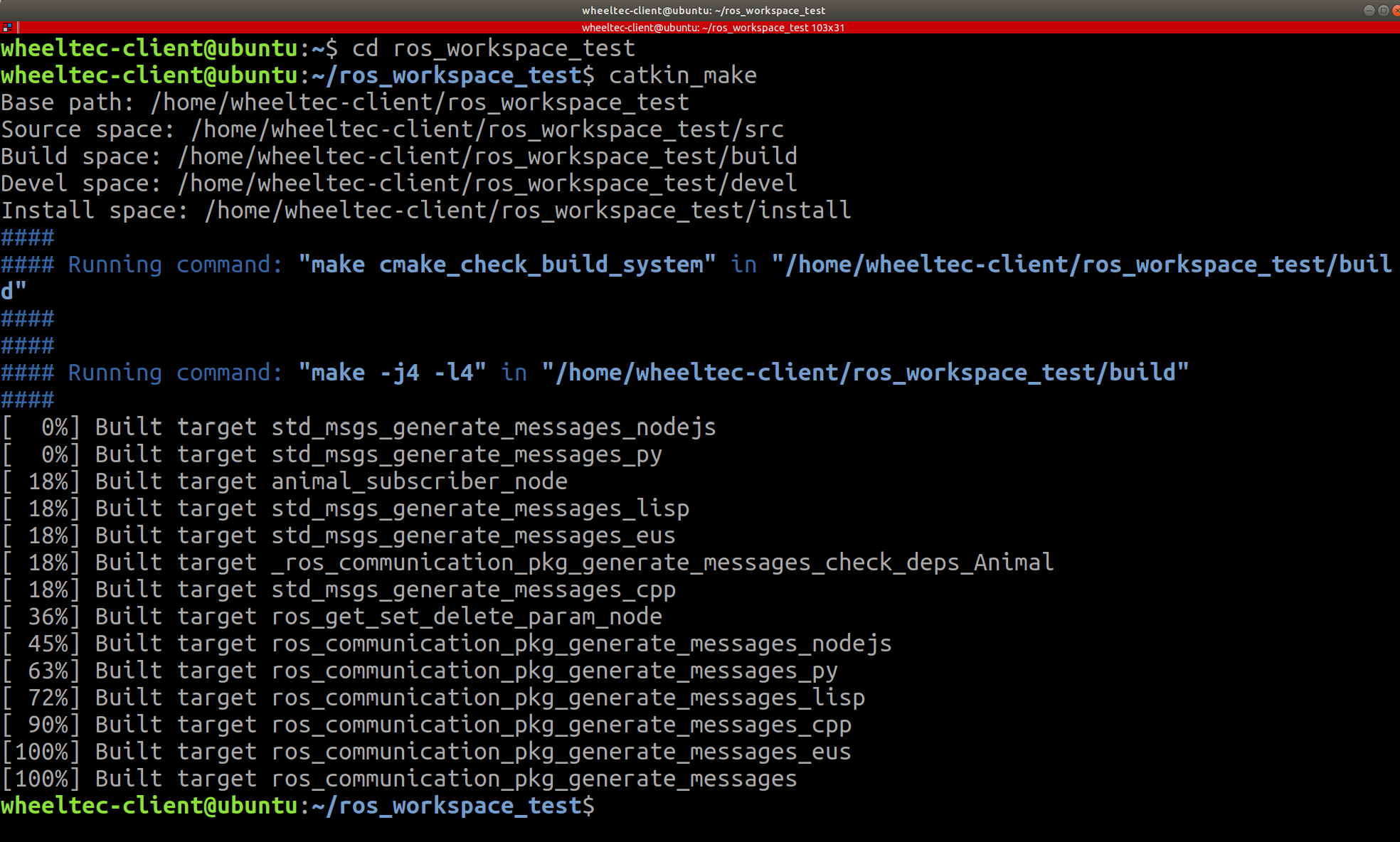
在ROS下,catkin_make 是一个常用的构建工具,用于编译和构建 ROS 功能包。 编译过程包含检查工作空间的目录结构,配置构建环境,编译功能包,生成构建结果。
编译成功后,catkin_make 会在工作空间的根目录中生成 build 和 devel 两个目录。
build 目录:包含编译过程中生成的临时文件和中间结果。
devel 目录:包含编译后的功能包二进制文件、库文件和脚本等。这些文件是可执行文件和库的最终构建结果。
step 4
将编译完成后的工作空间路径添加到系统环境变量中
echo " source ~/ros_workspace_test/devel/setup.bash" >> ~/.bashrc在官方操作手册中,命令中“ros_workspace_test/”部分存在错误(一些多余的空格)若你使用了官方文档提供的命令内容且后续无法正常运行,请检查你的拼写
ROS功能包与创建与节点的创建与运行
step1
创建自定义ROS功能包。
进入到工作空间目录中的子目录“src”路径下
cd src/创建包名为“ros_pkg”的ROS功能包
catkin_create_pkg ros_pkg roscpp rospy std_msgs效果如下图所示
catkin_create_pkg 是一个 ROS 命令行工具,用于创建一个新的 ROS 功能包。
ros_pkg:这是要创建的功能包的名称。可以根据需要选择一个有意义的名称。
roscpp:这是一个所需的依赖项,表示该功能包将使用 roscpp 库,它是用于 C++ 开发的 ROS 客户端库。
rospy:这是一个所需的依赖项,表示该功能包将使用 rospy 库,它是用于 Python 开发的 ROS 客户端库。
std_msgs:这是一个所需的依赖项,表示该功能包将使用 std_msgs 包,它是 ROS 中的标准消息包,包含一些常用的消息类型。
step2
板块一:编写C++源文件 (若你想执行python脚本,则请跳转到第二板块)
在ROS功能包ros_pkg目录中子目录“src”路径下输入以下命令,创建并编辑.cpp文件。
gedit ros_cpp.cpp执行该命令后,会弹出编辑器编辑该文件。将代码框中的内容直接复制粘贴进你打开的空文件中:
#include "ros/ros.h" //包含ros头文件
int main(int argc, char *argv[]) //编写ros的main函数
{
ros::init(argc, argv, "node_name_demo1"); //初始化ros节点
ROS_INFO("hello world!"); //输出日志
return 0;
}gedit是一个在桌面环境中运行的文本编辑器,在输入以下命令时文本编辑器可打开命令中所指定的文件。若当前目录下不存在这个文件,gedit将为你自动创建一个空文件供你编辑
gedit <filename>step2
编辑CamkeList.txt文件
首先进入工作空间的ros_pkg目录下
cd /home/wheeltec-client/ros_workspace_test/src/ros_pkg/随后使用gedit编辑CMakeLists.txt,命令如上在这里就不过多阐述。
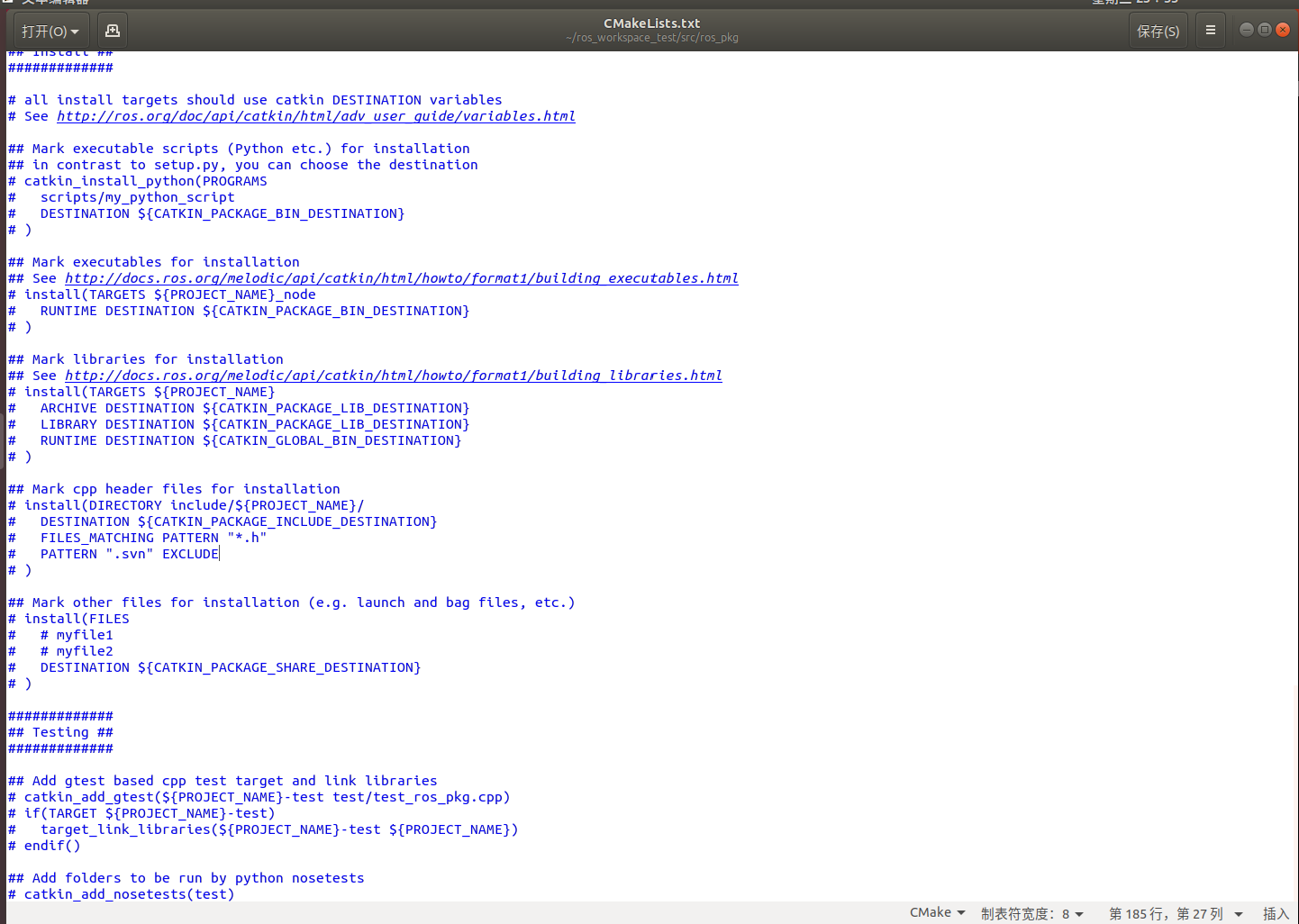
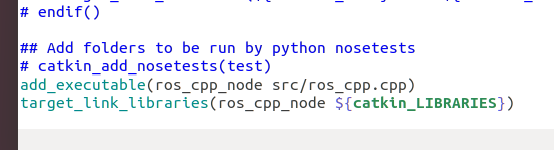
打开了“CMakeLists.txt”后在文件末尾加上编译规则和目标链接库:
编译规则(如下):
add_executable(ros_cpp_node src/ros_cpp.cpp)目标链接库(如下)
target_link_libraries(ros_cpp_node ${catkin_LIBRARIES})效果如下图所示
step4
编译功能包并创建可执行节点
使用cd命令回到工作空间根目录并再次进行编译
cd ros_workspace_test你可以使用以下命令进行便捷操作
cd ~ (返回你的/home/user/主文件夹下)
cd .. (返回上一级)返回工作空间主目录后再次使用catkin_make进行编译
catkin_make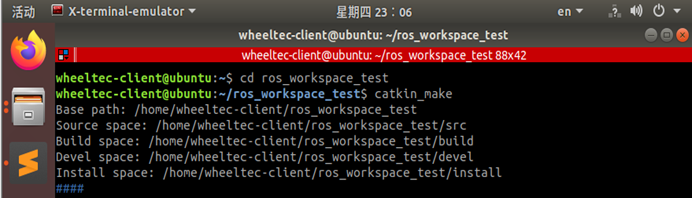
step5
开启ros master
在你的终端中键入以下指令
roscore在启动rosmaster后打开一个新终端(也可以使用终端终结者的分屏功能),并进入工作空间目录。
键入下列命令,运行“ros_cpp_node”节点
cd ros_workspace_test启动“ros_cpp_node”节点,并开始执行节点所定义的功能。如下图
rosrun ros_pkg ros_cpp_node
若终端打印出“hello world”则成功完成本文内容
板块二:在定义完毕的功能包下运行.py脚本
step1:编写一个py脚本
print('Hello World!')step2:使用已经定义过的ROS节点运行你的py脚本
rosrun my_package my_script.py (定义方式参照官方文档或上文内容)如果你没有定义你的工作节点,可以尝试以下命令(使用python解释器运行):
python /你工作空间的路径/devel/lib/my_package/my_script.py如果你的python脚本可以直接执行,可以尝试跳过python解释器:
/你工作空间的路径/devel/lib/my_package/my_script.pyFAQ
Q:我在编译时遇到报错说什么rosmaster未设置,我配对上小车以后提示进程冲突要求我杀死一个进程,这怎么办?
A: 因为这两行ip地址将话题监听器锁定在了小车的范围上,使其无法监听到本机rosmaster发布的话题。将其屏蔽即可解决你的问题。
打开你的主目录,找到一个名字为“bsahrc”的文件
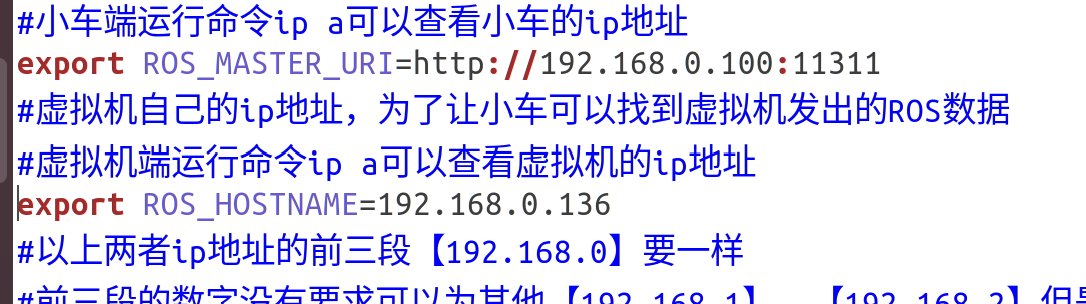
看到图中带ip地址的两行,使用#将其注释掉
重新编译即可解决问题
Q:我按照教程一步步做,但是还是错了。难道是拼写问题…吗?
A:自动补全!自动补全!自动补全!
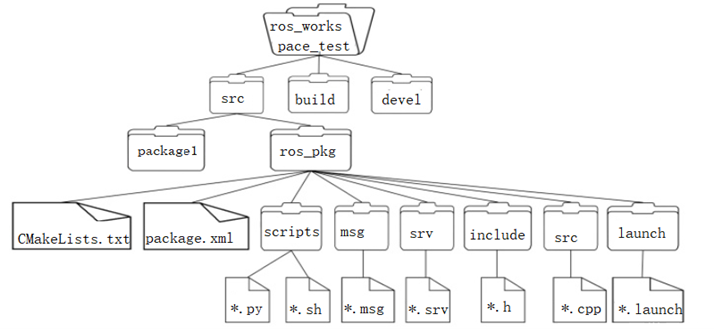
Q:我并没有对工作空间这个概念有一个很清晰的认知
A:这是ROS工作空间的目录树状图,包含了下列几乎所有目录。希望它可以加深你的理解。