本文将阐述如何将OCR安装包部署到小车内。并运行软件包自带的demo.py示例脚本。同时应用OCR库中的文字识别示例图片中的文字内容
第一步:挂载你的小车
挂载的具体原理在本文中不过多阐述 ,打开终端键入以下命令即可完成挂载
sudo mount -t nfs 192.168.0.100:/home/wheeltec/wheeltec_robot /mnt
第二步:准备前置条件
创建一个文件夹
首先找到src目录,在目录下创建一个新文件夹,并将其命名为ocr_detection1

然后在ocr_detection1目录下创建scripts目录

第三步:复制培训资料文件
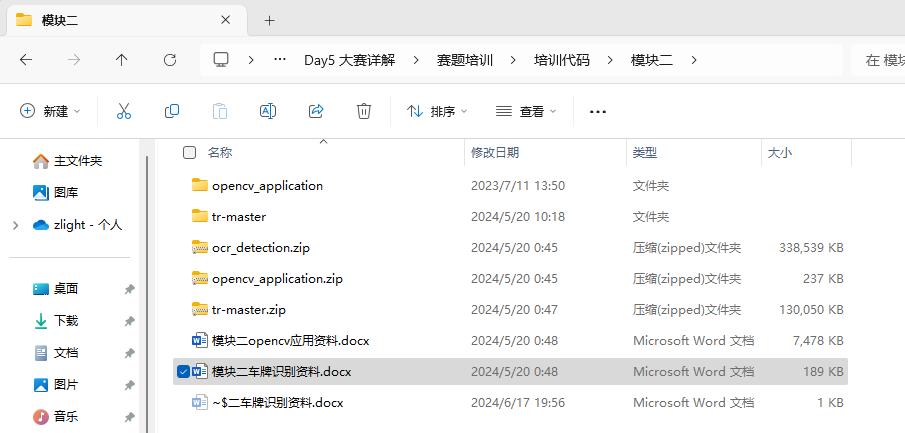
将培训资料Day5中的赛题培训-培训代码-模块2-Tr master中的所有文件复制到ocr_detection1/scripts目录中(除docx文档外)
第四步:安装TR-master(如果你的机器人已经集成了这个环境即可跳过它)
在存放TR-master文件的目录下打开终端,键入下列命令来安装它
sudo python setup.py install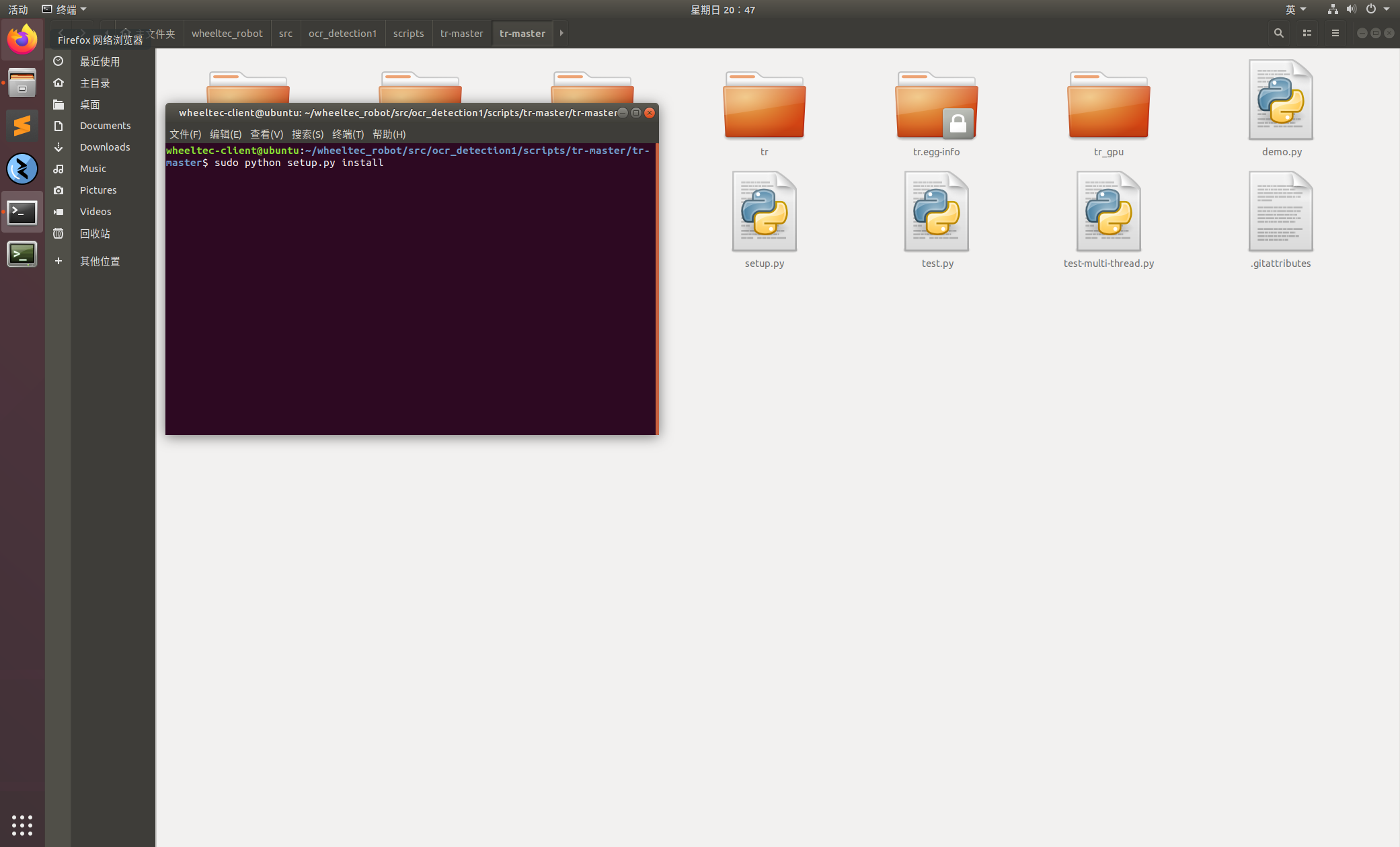
第五步:运行预置的demo.py脚本
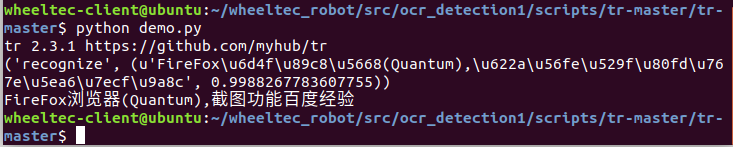
安装完成后,回到scripts文件夹,输入以下命令运行demo.py
python demo.py观察终端输出,你应该会看到打印出的文字内容
第六步:修改示例文件,实现不同的打印内容
使用文本编辑器打开demo.py文件(demo.py文件在scripts文件夹中)
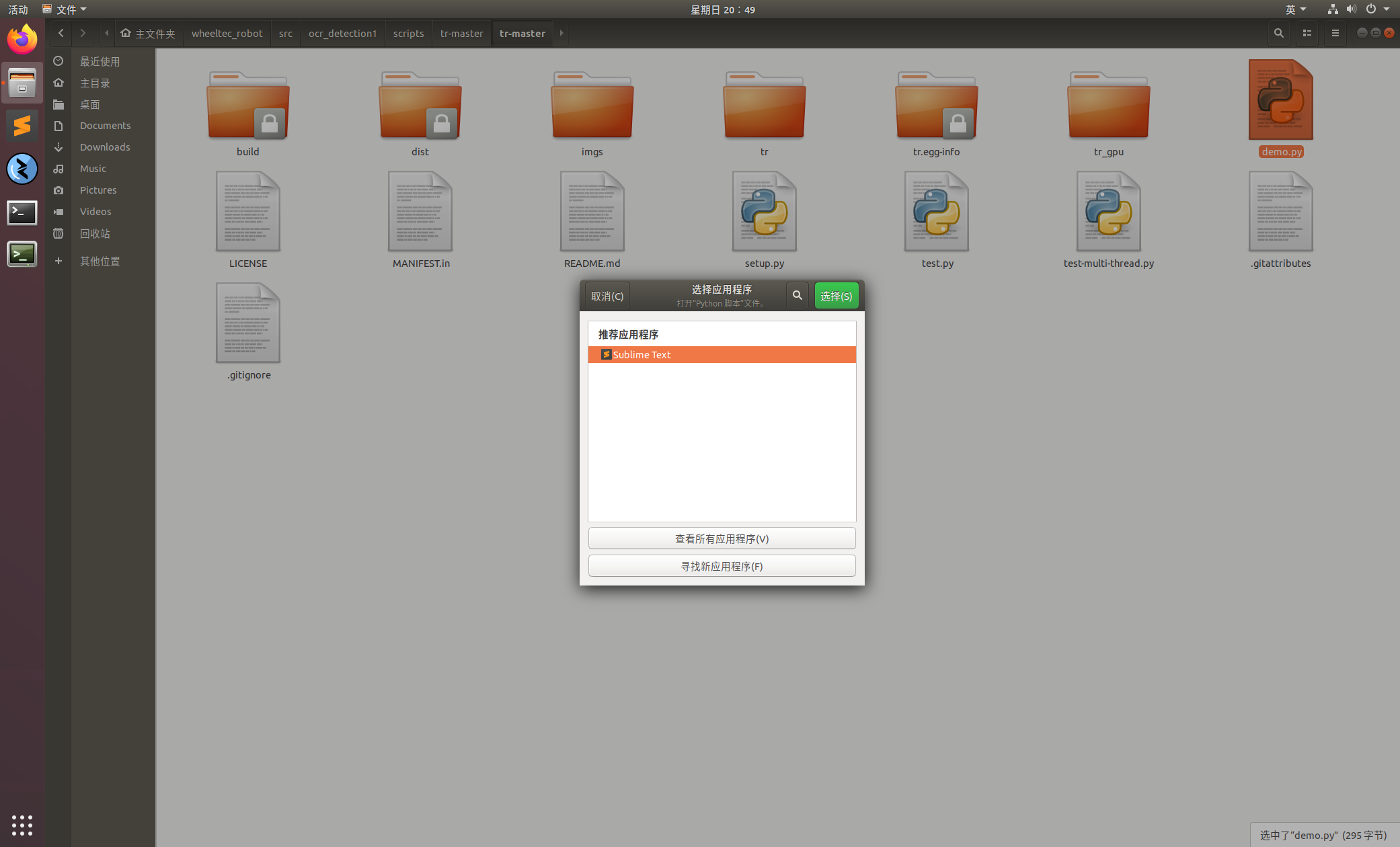 在打开文件后,你看到的源代码将如代码块中所示
在打开文件后,你看到的源代码将如代码块中所示
# coding: utf-8
# 声明:本代码的编码为UTF-8
import tr
import os
# 导入了两个模块,分别是"tr"和"os"
_BASEDIR = os.path.dirname(os.path.abspath(__file__))
# 获取了当前脚本的绝对路径,并从中提取了目录部分,将其存储在_BASEDIR变量中。这样做便于引用和这个脚本有关的目录,而忽略了绝对路径的限制
def test():
os.chdir(_BASEDIR)
# 更改当前工作目录为脚本所在的目录
print("recognize", tr.recognize("imgs/line.png"))
# 调用tr模块的recognize函数,并打印返回的结果。括号内为示例图片的文件名。
txt = tr.run("imgs/line.png")[0][1]
# 调用tr模块的run函数,并假设它返回一个列表的列表。中括号的内容提取了他在第一个列表中的第二个对象(文本内容)
print(txt)
# 打印提取的内容
if __name__ == "__main__":
test()如何修改当前示例的输出文本
首先我们先导入一张示例图片(这里以id_card.png为例)
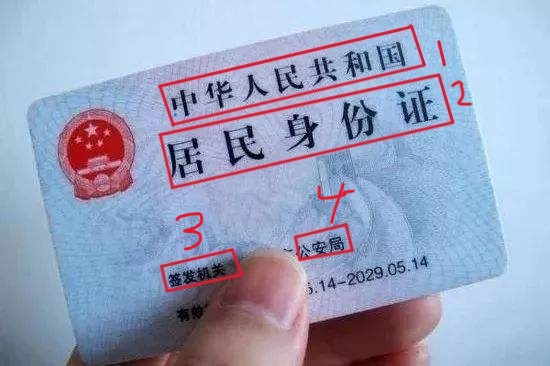
可以看到图中框选出来的部分有很多文字元素可供识别,想要修改识别的对象,先要找到第10行代码:
txt = tr.run("imgs/line.png")[0][1] 如果此时直接运行demo.py,将识别第一个对象

修改该行代码来更改它的识别对象,如下图所示:
txt = tr.run("imgs/line.png")[2][1]
# 识别图中的第3个对象保存文件并重新运行demo.py

呃…看起来什么都没有发生
出现无输出的情况,通常是因为这片区域内没有文本可供识别造成的。更换识别对象就可以解决
txt = tr.run("imgs/line.png")[3][1]
# 识别第四个对象 
此时,终端正常打印了对象4中的文字内容
让文本以数字代码形式在终端中打印
修改代码:
txt = tr.run("imgs/line.png")[0][0] 返回终端并再次运行demo.py

可以看到,文本内容已经变成了数字在终端中被打印。
使用OCR来识别车牌(或是带文字的其他内容)
在开始识别之前,你需要准备一张带文字的东西(这里以车牌显示器为例)
第一步:远程登录到小车的终端
打开你的系统终端,键入以下命令完成登录
ssh -Y wheelrec@192.168.0.100 密码为dongguan
第二步:启动你的车载摄像机
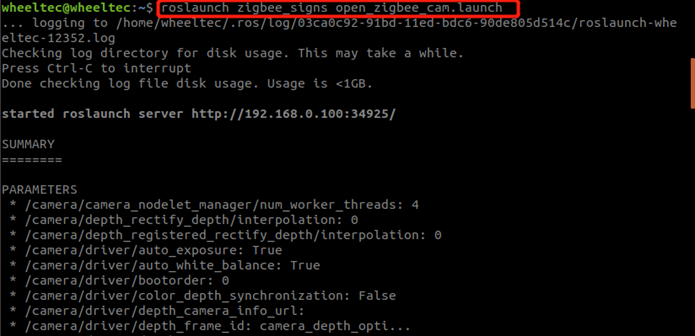
在终端中键入命令,在开启zigbee模块的同时也启动车载摄像机
roslaunch zigbee_signs open_zigbee_cam.launch 值得被注意的是,如果你的小车未安装zigbee模块。你仍然可以使用这条命令来启动摄像机
zigbee模块时由于没有防呆设计,安装时需注意针脚的朝向是否正确。错误的安装会导致模块烧毁!
第三步,执行脚本。将TR-master接入你的OCR中
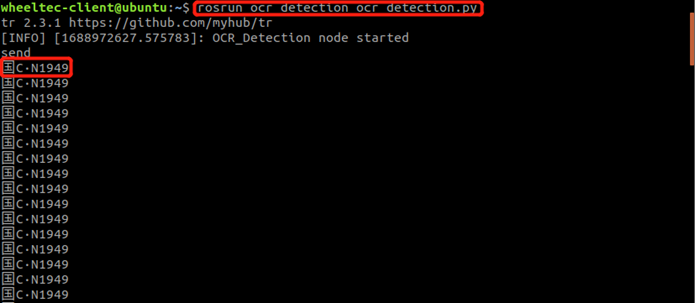
在终端键入以下命令来进行接入
rosrun ocr_detection ocr_detection.py 拿起你的车牌号显示器,把它对准你的车载摄像机

你就能在你的终端上看到识别成果了
FAQ
Q:我安装TRmaster的时候报错啊,完全装不上去。换了环境也不行。
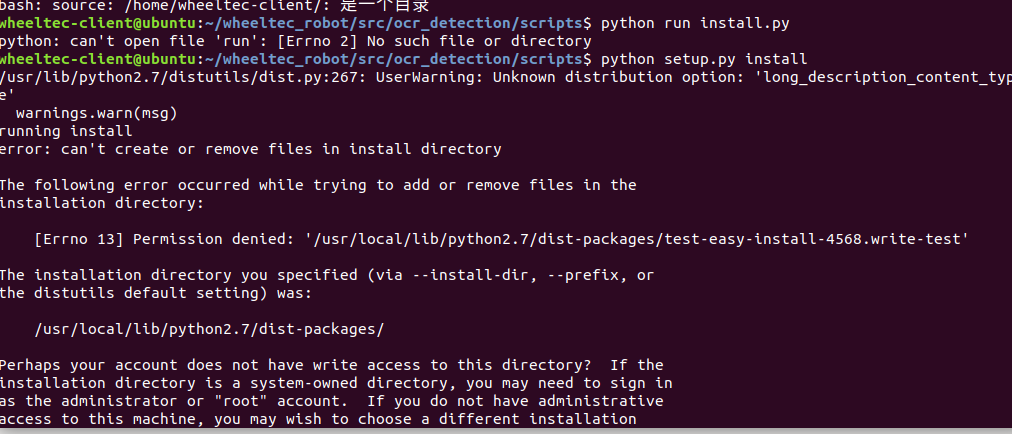 A:你的命令权限不足,尝试以系统用户执行。可以试试在命令前面加一个
A:你的命令权限不足,尝试以系统用户执行。可以试试在命令前面加一个sudo来确保它有足够的权限
Q: 我在启动ros小车摄像机节点的时候遇到了以下报错